Festo EPCC-BS-60-400-5P-A Käyttöohje
Festo Ei luokiteltu EPCC-BS-60-400-5P-A
Lue alta 📖 käyttöohje suomeksi merkille Festo EPCC-BS-60-400-5P-A (6 sivua) kategoriassa Ei luokiteltu. Tämä opas oli hyödyllinen 57 henkilölle ja sai 4.3 tähden keskimäärin 2 käyttäjältä
Sivu 1/6
EPCC-BS
Electric cylinder
Festo SE & Co. KG
Ruiter Straße 82
73734 Esslingen
Deutschland
+49 711 347-0
www.festo.com
Operating instructions
8172502
2022-03c
[8172504]
Translation of the original instructions
© 2022 all rights reserved to Festo SE & Co. KG
1
Applicable Documents
All available documents for the product
è
www.festo.com/sp.
2Safety
2.1Safety instructions
–
Observe labelling on the product.
–Before working on the product, switch off the power supply and secure it
against being switched on again.
–
Store the product in a cool, dry environment protected from UV and corrosion.
Keep storage times short.
–
Store the product in ambient conditions without oils, greases and grease-dis-
solving vapours.
2.2Intended Use
The electric cylinder is intended to be used for positioning payloads in combina-
tion with tools or as a drive when external guides are used.
2.3Training of qualified personnel
Work on the product may only be carried out by qualified personnel who can
evaluate the work and detect dangers. The qualified personnel have knowledge
and experience in dealing with electric drive systems.
3Additional information
–
Contact the regional Festo contact if you have technical problems
è
www.festo.com.
–
Accessories and spare parts
è
www.festo.com/catalogue.
4Product overview
4.1
Function
The electric cylinder converts the rotary motion of the mounted motor into a linear
motion of the non-rotating piston rod. The lead screw converts the torque of the
motor into a feed force. The linear movement of the piston rod is guided by the
guide in the guide ring. Sensors enable the monitoring of end positions, reference
position and intermediate position.
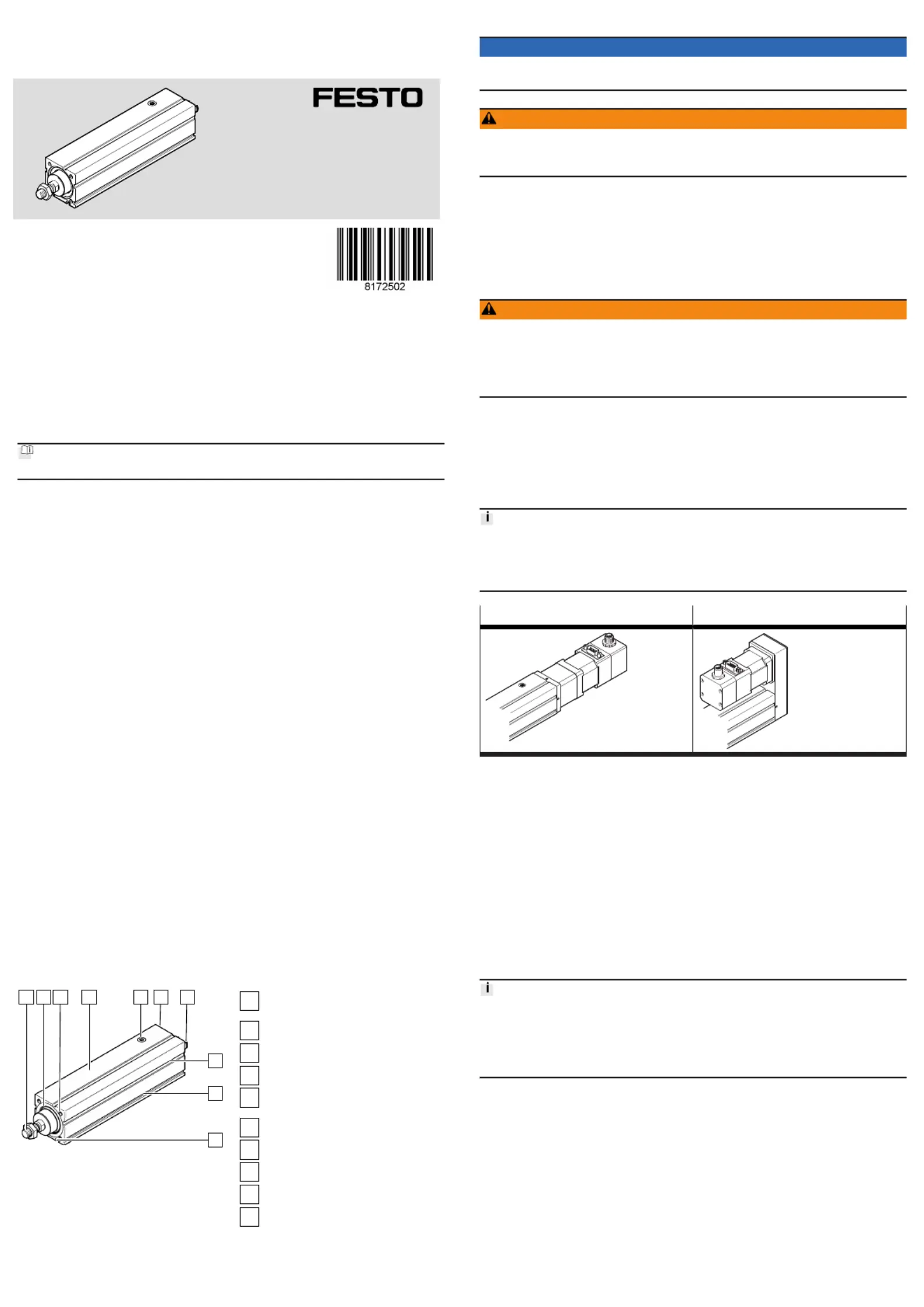
4.2
Product design
1234567
8
9
10
Fig. 1:
Product design EPCC-BS,
example EPCC-BS-45-100-10P-
A7-A
1
Piston rod with male thread or female
thread
2
Guide ring with or without scraper
3
Threaded hole for mounting
4
Cylinder profile
5
Sealing air connection with filter ele-
ment
6
Interface for motor mounting kit
7
Drive hub
8
Slot for sensor bracket
9
Slot for profile mounting
10
Slot for slot nut
5Transport
NOTICE
Unexpected and unbraked movement of components
•Secure moving components for transport.
WARNING
Risk of injury due to falling product
If the product is lifted incorrectly, it may fall and cut, crush or separate body parts.
•Lift the product only with suitable load-bearing equipment.
–Store and transport the product in its original packaging. Observe the weight,
the dimensions and the ambient conditions.
–
Take the centre of gravity of the product into consideration.
–Store and transport the product in a horizontal position.
6Assembly
6.1
Safety
WARNING
Risk of Injury due to Unexpected Movement of Components
For vertical or slanted mounting position: when power is off, moving parts can
travel or fall uncontrolled into the lower end position.
•
Bring moving parts of the product into a safe end position or secure them
against falling.
6.2
Unpacking product
1.
Open packaging.
2.
Remove all transport materials, e.g. foils, caps, cardboard boxes.
3.
Remove the product from the packaging and place it on the mounting surface.
4.
Dispose of packaging and transport materials.
6.3Mounting motor
Transverse load on the drive hub
When mounting the motor and motor mounting kit, do not exceed the maximum
transverse load F
R
of the drive hub, e.g. toothed belt tension when mounting the
parallel kit
è
12.1 Technical data, mechanical.
Axial kit EAMM-AParallel kit EAMM-U
Tab. 1:
Overview of motor mountings
Requirement
–
Only loosen screws or threaded pins that are described in the directions in the
instruction manuals.
–
Sufficient space for reaching and mounting the sealing air connection .
1.Select the motor and motor mounting kit from
Festo
è
www.festo.com/catalogue.
If other motors are used: observe the critical limits for forces, torques and
velocities.
2.Fasten motor mounting kit, observe instruction manual
è
www.festo.com/sp.
3.
Fasten the motor without tension. Support large and heavy motors.
Connect motor cables only on completion of mounting.
6.4Mounting cylinder
High mechanical loads on the mounting connections
If high parallel torques are applied to the drive system at the same time, this will
result in high mechanical loads at the mounting interfaces.
•
If the mounting position is inclined or horizontal with direct fastening, the drive
system will require additional support near the motor mounting.
Requirement
–
No collision in the range of motion of the attachment component with motor,
mounting components and sensor components.
–Sufficient space to reach maintenance interfaces.
–
Sufficient space for reaching and mounting the sealing air connection.
–Flat mounting surface maximum 0.2 mm over the stroke length of the bearing
surface.
–No distortion or bending when installing the product.
1.
Select mounting attachments
è
www.festo.com/catalogue.
2.Place the mounting attachments on the support points.
3.Tighten retaining screws.
Observe the maximum tightening torque and screw-in depth.
For additional information, contact your local Festo Service.
Tuotetiedot
| Merkki: | Festo |
| Kategoria: | Ei luokiteltu |
| Malli: | EPCC-BS-60-400-5P-A |
Tarvitsetko apua?
Jos tarvitset apua merkille Festo EPCC-BS-60-400-5P-A esitä kysymys alla ja muut käyttäjät vastaavat sinulle
Ei luokiteltu Festo Käyttöohjeet

30 Maaliskuuta 2025
30 Maaliskuuta 2025
30 Maaliskuuta 2025
30 Maaliskuuta 2025
30 Maaliskuuta 2025
30 Maaliskuuta 2025
30 Maaliskuuta 2025
30 Maaliskuuta 2025
30 Maaliskuuta 2025
30 Maaliskuuta 2025
Ei luokiteltu Käyttöohjeet
Viimeisimmät Ei luokiteltu Käyttöohjeet
9 Huhtikuuta 2025
9 Huhtikuuta 2025
9 Huhtikuuta 2025
9 Huhtikuuta 2025
9 Huhtikuuta 2025
9 Huhtikuuta 2025
9 Huhtikuuta 2025
9 Huhtikuuta 2025
9 Huhtikuuta 2025
9 Huhtikuuta 2025